Collaborating partners
- University of Ljubljana, Faculty of Computer and Information Science
- Kolektor Mobility Upravljanje naložb d.o.o.
Funding
- ARIS (L2-3169)











Scope
MV4.0 addressed one of the main bottlenecks of industrial machine vision: modern deep models usually require large and densely annotated image collections, while such data are expensive to collect in real industrial settings. The project developed a coherent data-driven framework that combines three complementary directions:
- synthetic data generation from 3D models with automatic annotation,
- annotation-efficient learning with point supervision, active learning, and few-shot learning,
- self-supervised and unsupervised modelling for visual anomaly detection.
The developed methods were validated in two main application domains:
- surface-defect detection and anomaly localisation, including RGB and RGB+3D inspection,
- object localisation and pose-related perception, including data-efficient localisation and 3DoF pose estimation.
The project was carried out from October 2021 to September 2025 in collaboration with Kolektor Group as the industrial co-funder.
Main results
The project delivered the following main outcomes:
- a reproducible pipeline for generating synthetic industrial training data from 3D models,
- new point-supervised, few-shot, and active-learning methods that substantially reduce annotation effort,
- a strong research line in unsupervised anomaly detection, including DSR, 3DRÆM / 3D anomaly simulation, and TransFusion,
- validated methods for industrial surface inspection, crack detection, object localisation, and 3DoF pose-related perception,
- top scientific outputs in venues such as ECCV (DSR, TransFusion), CVPR (DAVE), Pattern Recognition (CeDiRNet), Pattern Recognition Letters (3D anomaly simulation), IEEE RA-L (CeDiRNet-3DoF), and ICPR / Journal of Intelligent Manufacturing (SuperSimpleNet and its extension),
- a demonstration cell for public and professional presentation of the developed technology.
Realised work packages
WP1, Synthetic data generation and domain adaptation
We developed a reproducible synthetic-data pipeline for industrial scenes using BlenderProc, automatic annotation, and controlled rendering variation. This line was extended towards RGB+3D anomaly scenarios through depth simulation, enabling improved modelling of subtle geometric defects.
WP2, Annotation-efficient learning
We developed methods that reduce the need for dense manual annotation, including:
- point-supervised centre-direction learning for object counting and localisation,
- few-shot counting through the DAVE detect-and-verify paradigm,
- active learning with mixed labels for surface-defect detection,
- unified supervised and unsupervised defect detection with SuperSimpleNet.
WP3, Self-supervised and unsupervised learning
A major project line focused on anomaly detection without labelled defect samples. This includes:
- DSR, a dual-subspace re-projection method for surface anomaly detection,
- 3D anomaly detection methods based on simulated depth anomalies,
- diffusion-based anomaly detection culminating in TransFusion,
- studies of robustness to domain shift and training-set contamination.
WP4, Transfer to applications
The developed methods were transferred to the target application domains from the proposal:
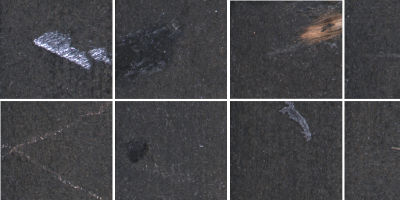
- surface inspection, including 2D and RGB+3D anomaly detection and crack segmentation,
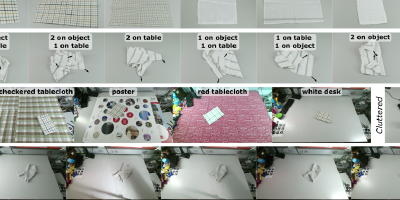
- object localisation and 3DoF pose-related perception, including industrial parts and grasp-point localisation on deformable objects.
The methods were evaluated on public benchmarks and industrially relevant data in cooperation with Kolektor Group.
WP5, Dissemination and exploitation
The project produced a strong publication record led by papers in ECCV, CVPR, Pattern Recognition, Pattern Recognition Letters, IEEE RA-L, ICPR, and the Journal of Intelligent Manufacturing, complemented by invited talks, award-winning student work, and a modular demonstration cell used for professional and public presentation of the developed methods. Shorter ERK and ROSUS papers mainly served as supporting dissemination of specific application results.
WP6, Project management
The project was completed according to the planned overall logic, from data-generation and unsupervised-learning foundations to annotation-efficient learning, application studies, dissemination, and demonstrator integration.
Software, datasets, and related resources
Project-related software and datasets:
Related research overviews:
Publications
Funding
MV4.0 was funded by ARIS and co-funded by Kolektor Mobility Upravljanje naložb d.o.o.
